RP2 快速参考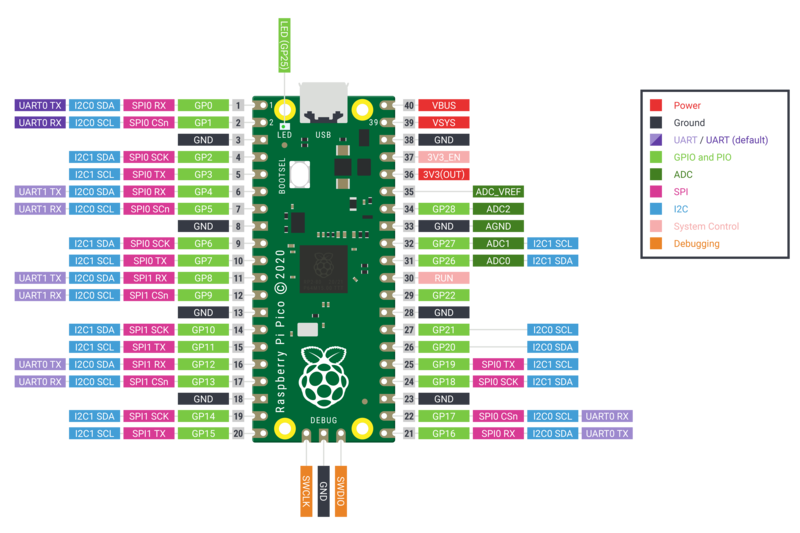 Raspberry Pi Pico 开发板(图片来源:Raspberry Pi Foundation)。 以下是 Raspberry Pi RP2xxx 板的快速参考。如果这是您第一次使用该板,了解微控制器的概述可能会很有用:
安装 MicroPython请参阅教程的相应部分:RP2xxx 上的 MicroPython 入门。它还包括故障排除小节。
通用板控制MicroPython REPL 通过 USB 串行端口访问。制表符完成对于找出对象具有哪些方法很有用。粘贴模式 (ctrl-E) 可用于将大量 Python 代码粘贴到 REPL 中。 该 machine 模块: - import machine
- machine.freq() # get the current frequency of the CPU
- machine.freq(240000000) # set the CPU frequency to 240 MHz
该 rp2 模块: import rp2
延迟和计时使用 time模块: - import time
- time.sleep(1) # sleep for 1 second
- time.sleep_ms(500) # sleep for 500 milliseconds
- time.sleep_us(10) # sleep for 10 microseconds
- start = time.ticks_ms() # get millisecond counter
- delta = time.ticks_diff(time.ticks_ms(), start) # compute time difference
计时器RP2040 的系统定时器外设提供全局微秒时基并为其产生中断。软件定时器目前可用,数量不限(内存允许)。不需要指定计时器 id(目前支持 id=-1),因为它会默认为这个。 使用 machine.Timer类: - from machine import Timer
- tim = Timer(period=5000, mode=Timer.ONE_SHOT, callback=lambda t:print(1))
- tim.init(period=2000, mode=Timer.PERIODIC, callback=lambda t:print(2))
引脚和 GPIO使用 machine.Pin类: - from machine import Pin
- p0 = Pin(0, Pin.OUT) # create output pin on GPIO0
- p0.on() # set pin to "on" (high) level
- p0.off() # set pin to "off" (low) level
- p0.value(1) # set pin to on/high
- p2 = Pin(2, Pin.IN) # create input pin on GPIO2
- print(p2.value()) # get value, 0 or 1
- p4 = Pin(4, Pin.IN, Pin.PULL_UP) # enable internal pull-up resistor
- p5 = Pin(5, Pin.OUT, value=1) # set pin high on creation
UART(串行总线)有两个 UART,UART0 和 UART1。UART0 可以映射到 GPIO 0/1、12/13 和 16/17,UART1 可以映射到 GPIO 4/5 和 8/9。 参见 machine.UART。 - from machine import UART, Pin
- uart1 = UART(1, baudrate=9600, tx=Pin(4), rx=Pin(5))
- uart1.write('hello') # write 5 bytes
- uart1.read(5) # read up to 5 bytes
笔记ote 认情况下禁用通过 UART 的 REPL。您可以在RP2xxx 上查看MicroPython 入门以了解有关如何通过 UART 启用 REPL 的详细信息。
PWM(脉宽调制)有 8 个独立通道,每个通道有 2 个输出,总共 16 个 PWM 通道,时钟频率可以从 7Hz 到 125Mhz。 使用 machine.PWM类: - from machine import Pin, PWM
- pwm0 = PWM(Pin(0)) # create PWM object from a pin
- pwm0.freq() # get current frequency
- pwm0.freq(1000) # set frequency
- pwm0.duty_u16() # get current duty cycle, range 0-65535
- pwm0.duty_u16(200) # set duty cycle, range 0-65535
- pwm0.deinit() # turn off PWM on the pin
ADC(模数转换)RP2040 共有五个 ADC 通道,其中四个是基于 12 位 SAR 的 ADC:GP26、GP27、GP28 和 GP29。ADC0、ADC1、ADC2、ADC3的输入信号可以分别接GP26、GP27、GP28、GP29(Pico板上GP29接VSYS)。标准的 ADC 范围是 0-3.3V。第五个通道连接到内置温度传感器,可用于测量温度。 使用machine.ADC类: - from machine import ADC, Pin
- adc = ADC(Pin(26)) # create ADC object on ADC pin
- adc.read_u16() # read value, 0-65535 across voltage range 0.0v - 3.3v
软件SPI总线软件 SPI(使用 bit-banging)适用于所有引脚,并通过 machine.SoftSPI 类访问 : - from machine import Pin, SoftSPI
- # construct a SoftSPI bus on the given pins
- # polarity is the idle state of SCK
- # phase=0 means sample on the first edge of SCK, phase=1 means the second
- spi = SoftSPI(baudrate=100_000, polarity=1, phase=0, sck=Pin(0), mosi=Pin(2), miso=Pin(4))
- spi.init(baudrate=200000) # set the baudrate
- spi.read(10) # read 10 bytes on MISO
- spi.read(10, 0xff) # read 10 bytes while outputting 0xff on MOSI
- buf = bytearray(50) # create a buffer
- spi.readinto(buf) # read into the given buffer (reads 50 bytes in this case)
- spi.readinto(buf, 0xff) # read into the given buffer and output 0xff on MOSI
- spi.write(b'12345') # write 5 bytes on MOSI
- buf = bytearray(4) # create a buffer
- spi.write_readinto(b'1234', buf) # write to MOSI and read from MISO into the buffer
- spi.write_readinto(buf, buf) # write buf to MOSI and read MISO back into buf
警告 目前所有的sck, mosi 而且 miso必须初始化软件SPI时指定。
硬件SPI总线RP2040 有 2 条硬件 SPI 总线,可通过 machine.SPI c类访问, 方法与上述软件 SPI 相同: - from machine import Pin, SPI
- spi = SPI(1, 10_000_000) # Default assignment: sck=Pin(10), mosi=Pin(11), miso=Pin(8)
- spi = SPI(1, 10_000_000, sck=Pin(14), mosi=Pin(15), miso=Pin(12))
- spi = SPI(0, baudrate=80_000_000, polarity=0, phase=0, bits=8, sck=Pin(6), mosi=Pin(7), miso=Pin(4))
软件 I2C 总线软件 I2C(使用 bit-banging)适用于所有具有输出功能的引脚,并通过machine.SoftI2C类访问: - from machine import Pin, SoftI2C
- i2c = SoftI2C(scl=Pin(5), sda=Pin(4), freq=100_000)
- i2c.scan() # scan for devices
- i2c.readfrom(0x3a, 4) # read 4 bytes from device with address 0x3a
- i2c.writeto(0x3a, '12') # write '12' to device with address 0x3a
- buf = bytearray(10) # create a buffer with 10 bytes
- i2c.writeto(0x3a, buf) # write the given buffer to the peripheral
硬件 I2C 总线驱动程序通过 machine.I2C类访问,并具有与上述软件 I2C 相同的方法: - from machine import Pin, I2C
- i2c = I2C(0) # default assignment: scl=Pin(9), sda=Pin(8)
- i2c = I2C(1, scl=Pin(3), sda=Pin(2), freq=400_000)
实时时钟 (RTC)见机器.machine.RTC - from machine import RTC
- rtc = RTC()
- rtc.datetime((2017, 8, 23, 2, 12, 48, 0, 0)) # set a specific date and
- # time, eg. 2017/8/23 1:12:48
- rtc.datetime() # get date and time
WDT(看门狗定时器)RP2040 有一个看门狗,它是一个倒数计时器,可以在它达到零时重新启动芯片的某些部分。 参见 machine.WDT. - from machine import WDT
- # enable the WDT with a timeout of 5s (1s is the minimum)
- wdt = WDT(timeout=5000)
- wdt.feed()
单线驱动OneWire 驱动程序在软件中实现并适用于所有引脚: - from machine import Pin
- import onewire
- ow = onewire.OneWire(Pin(12)) # create a OneWire bus on GPIO12
- ow.scan() # return a list of devices on the bus
- ow.reset() # reset the bus
- ow.readbyte() # read a byte
- ow.writebyte(0x12) # write a byte on the bus
- ow.write('123') # write bytes on the bus
- ow.select_rom(b'12345678') # select a specific device by its ROM code
DS18S20 和 DS18B20 设备有一个特定的驱动程序: - import time, ds18x20
- ds = ds18x20.DS18X20(ow)
- roms = ds.scan()
- ds.convert_temp()
- time.sleep_ms(750)
- for rom in roms:
- print(ds.read_temp(rom))
一定要在数据线上放一个4.7k的上拉电阻。请注意,convert_temp()每次要对温度进行采样时都必须调用该方法。
NeoPixel 和 APA106 驱动程序使用 neopixel和 apa106模块: - from machine import Pin
- from neopixel import NeoPixel
- pin = Pin(0, Pin.OUT) # set GPIO0 to output to drive NeoPixels
- np = NeoPixel(pin, 8) # create NeoPixel driver on GPIO0 for 8 pixels
- np[0] = (255, 255, 255) # set the first pixel to white
- np.write() # write data to all pixels
- r, g, b = np[0] # get first pixel colour
APA106 驱动程序扩展了 NeoPixel,但在内部使用了不同的颜色顺序: - from apa106 import APA106
- ap = APA106(pin, 8)
- r, g, b = ap[0]
APA102 (DotStar) 使用不同的驱动器,因为它有一个额外的时钟引脚。
|
 |Archiver|手机版|小黑屋|MicroPython中文社区
( 粤ICP备2025483731号 )
|Archiver|手机版|小黑屋|MicroPython中文社区
( 粤ICP备2025483731号 )




 发表于 2022-1-20 09:09:23
发表于 2022-1-20 09:09:23